METODĂ ŞI SISTEM DE CONTROL NEINTRUZIV
Prețul nu e vizibil în cazul acestui pachet
Atribuire
Nr.: RO121293
Data: 28.02.2007
TUDOR MIRCEA [RO]
SIMA CONSTANTIN [RO]
TUDOR GHEORGHE [RO]
IONESCU R ESVAN [RO]
GRECHI CRISTIAN [RO]
MIEILIC E EMILIAN [RO]
ERBAN EDUARD [RO]
BAAEZGAN ADRIAN [RO]
DURALIA ADRIAN [RO]
OANCEA FLORIN [RO]
GHI E PETRE [RO]
SEMENESCU SERGIU [RO]
Descriere:
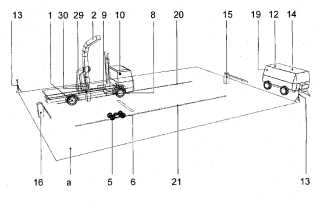
Invenţia se referă la o metodă ?i un sistem de control neintruziv, prin radiografierea unui obiect, cum ar fi un container, un autovehicul sau unvagon de tren. Metoda conform invenţiei constă din amplasarea obiectului de scanat în zona de scanare ?i activarea protecţiei perimetrale a zonei de excludere, iniţializarea procesului de scanare, prin transmiterea telecomandată a comenzilor către două unităţi mobile de scanare, emiţătoare ?i, respectiv, detectoare de radiaţii, iniţializarea deplasării unităţilor mobile, afi?area imaginii rezultată în urma scanării, pe monitorul operatorului, dezactivarea automată a protecţiei perimetrale a zonei ?i revenirea, la poziţia iniţială, a celor două unităţi mobile descanare; oprirea automată a scanării putând fifăcută manual sau automat, în anumite cazuri. Sistemul, în cadrul căruia este aplicată metoda, este constituit dintr-o unitate mobilă de scanare, instalată pe un auto?asiu (1), din ni?te detectoare de radiaţii penetrante (3 ?i 4), o unitate mobilă (5), care constă dintr-un robot ce conţine o sursă de radiaţie penetrantă (6), celedouă unităţi mobile conţinând subsisteme pentru controlul automat al direcţiei, sensului ?i vitezei de deplasare (10), de sincronizare a poziţiei (7), de transmisie hidraulică (9) ?i sunt gestionate de un centru mobil, de control de la distanţă (12), poziţionat în afara zonei de excludere, care mai gestionează ?i ni?te subsisteme de achiziţie, prelucrare, stocare ?i afi?are a imaginii radiografiate (11), de protecţie perimetrală (13), de management automat al traficului (14) ?i de gestiune informatizată (19).