SISTEM DE SUSPENSIE ACTIVĂ CU MECANISM PLANETAR DIFERENŢIAL
Price not visible for this package
Assignment
No.: RO135975
Date: 30.09.2022
BARBOI FLORIN [RO]
Description:
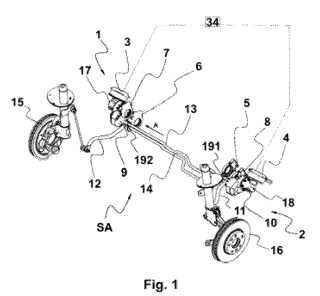
Invenţia se referă la un sistem de suspensie activă destinat echipării roţilor unei osii a unui automobil. Sistemul conform invenţiei este constituit pentru fiecare parte a unei osii dintr-un modul de suspensie activă pentru două roţi (1 şi 2) dreapta şi stânga, cele două module de suspensie activă cuprind două actuatoare (3 şi 4) conectate la nişte mijloace (9 şi 10) de demultiplicare a forţei asociate cu nişte roţi (15 şi 16) stânga şi dreapta prin intermediul unor bare (13 şi 14) de torsiune care comandă o deplasare relativă între roţile (15 şi 16) stânga şi dreapta, către în sus şi în jos, mijloacele (9 şi 10) de demultiplicare a forţei fiind destinate să transforme o mişcare de rotaţie a actuatoarelor (3 şi 4) în două mişcări de rotaţie opuse ale barelor (13 şi 14) de torsiune în jurul unei axe (A) de rotaţie cu cuplu ridicat şi viteză mare, capetele barelor (13 şi 14) de torsiune sunt destinate a fi cuplate respectiv la mijloacele (9 şi 10) de demultiplicare a forţei şi la două braţe (11 şi 12) ale roţilor (15 şi 16) stânga şi dreapta, nişte senzori (5 şi 6) unghiulari de mişcare pentru măsurarea în permanenţă a deplasării în plan vertical a roţilor (15 şi 16) stânga şi dreapta, nişte senzori (7 şi 8) unghiulari de forţă de torsiune pentru măsurarea forţei de torsiune pe barele (13 şi 14) de torsiune, cele două braţe (11 şi 12) fiind destinate să transforme cele două mişcări de rotaţie opuse ale barelor (13 şi 14) de torsiune în jurul axei (A) de rotaţie, în două mişcări în sus şi în jos ale roţilor (15 şi 16) stânga şi dreapta şi nişte mijloace (34) de comandă pentru transmiterea unui semnal de comandă în direcţia actuatoarelor (3 şi 4) şi destinate să comande funcţionarea acestora în conformitate cu măsurătorile senzorilor (5 şi 6) unghiulari de mişcare şi semnalele senzorilor (7 şi 8) unghiulari de forţă de torsiune.